ROBOT CHASSIS
FULLY OPEN SDK
ROBOT CHASSIS
FULLY OPEN SDK
Intelligent Open SDK Smart Robot Chassis Autonomous Mobile Robot AGV
The newly designed robot chassis incorporates several high-tech technologies: fully open SDK—maximum support for users of the secondary development. Combined with laser radar and visual positioning, the robot chassis realizes the indoor navigation technology of intelligent mapping. Approximately 40,000 square meters of construction plans are supported.
HOT WHEEL-ROBOT CHASSIS
Hot Wheels chassis is a general-purpose mobile robot platform that integrates various sensor fusion technologies such as lidar, 3D camera, IR camera, ultrasonic, and infrared sensors. It has mature and stable navigation algorithms and has absolute positioning, navigation, and path planning. Capabilities, rich interfaces, support for secondary
development or customized services to meet the needs of different robot development.
Hot Wheels chassis is a general-purpose mobile robot platform that integrates various sensor fusion technologies such as lidar, 3D camera, IR camera, ultrasonic, and infrared sensors. It has mature and stable navigation algorithms and has absolute positioning, navigation, and path planning. Capabilities, rich interfaces, support for secondary
development or customized services to meet the needs of different robot development.







HOT WHEELS
ROBOT CHASSIS
Open SDK to lead the era

WIRELESS TECHNOLOGY AP6255
Support Dual-band WIFI 2.4&5G
INTEL i5 PROCESSOR
Fast running
BATTERY UPGRADE
20Ah 37V
OPEN SDK PLATFORM
Fully open the SDK to all users, provide API interfaces, and support users’ technology research and development to the greatest extent, breaking traditional technology research and development limitations, improving research and development efficiency, and reducing development costs.
Fully open the SDK to all users, provide API interfaces, and support users’ technology research and development to the greatest extent, breaking traditional technology research and development limitations, improving research and development efficiency, and reducing development costs.


AUTOMATIC PLANNING ROUTE, FLEXIBLE OBSTACLE AVOIDANCE
Laser SLAM and V-SLAM multi-sensor fusion algorithm, custom planning robot walking route, 3D camera anti-collision design, lidar detection range of 25 meters, detection angle of 270 °, accurate identification of the surrounding environment, automatic detour in case of obstacles.
Laser SLAM and V-SLAM multi-sensor fusion algorithm, custom planning robot walking route, 3D camera anti-collision design, lidar detection range of 25 meters, detection angle of 270 °, accurate identification of the surrounding environment, automatic detour in case of obstacles.
REMOTE NAVIGATION DEPLOYMENT
The world’s unique remote and convenient deployment capability.
Build an indoor robot map remotely, and visualize the virtual wall setting, which is convenient and efficient.
Through the cloud service platform, the robot can be remotely connected and controlled, and the navigation map can be constructed visually throughout the whole process, reducing the response time of operation and maintenance services, allowing users to put the robot into use in a
the shorter time, saving time and costs.
The world’s unique remote and convenient deployment capability.
Build an indoor robot map remotely, and visualize the virtual wall setting, which is convenient and efficient.
Through the cloud service platform, the robot can be remotely connected and controlled, and the navigation map can be constructed visually throughout the whole process, reducing the response time of operation and maintenance services, allowing users to put the robot into use in a
the shorter time, saving time and costs.

OPEN PLATFORM
ACCURATELY BUILD A MAP
PLANNING THE PATH
OPEN PLATFORM
ACCURATELY BUILD A MAP
PLANNING THE PATH
OBSTACLE AVOIDANCE
AUTOMATIC CHARGING
CLOUD DEBUGGING
OBSTACLE AVOIDANCE
AUTOMATIC CHARGING
CLOUD DEBUGGING
AUTONOMOUS TAKE ELEVATOR (OPTIONAL)
Accurately monitor and identify elevator status, realize linkage with elevator and access control, and flexibly and stably carry out cross-floor work.

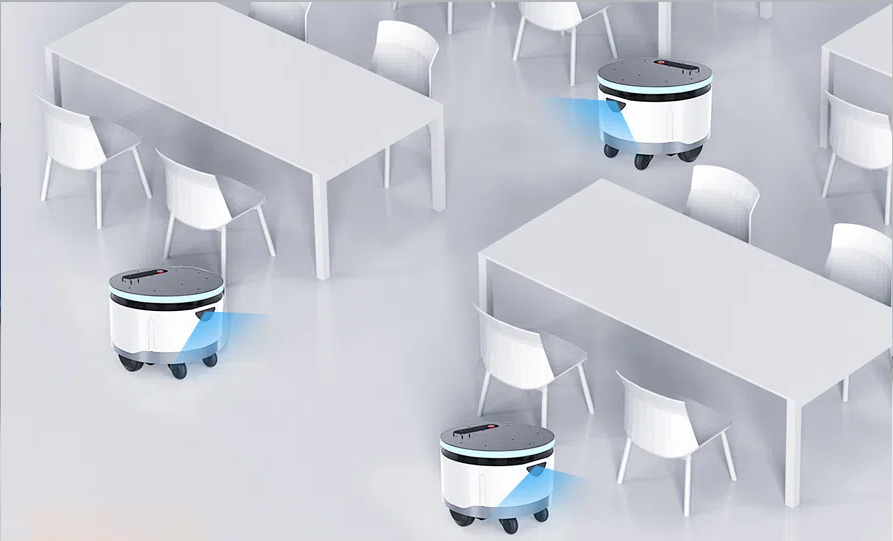
AUTONOMOUS SCHEDULING SYSTEM
The chassis adopts the positioning and navigation system independently developed by Reeman, which supports cloud sharing in multi-machine scenarios, and can intelligently avoid and operate in an orderly manner in
congested road sections. Through one-click cloud calling, users can assign tasks intelligently. When two machines meet, they will pass by priority.
The chassis adopts the positioning and navigation system independently developed by Reeman, which supports cloud sharing in multi-machine scenarios, and can intelligently avoid and operate in an orderly manner in
congested road sections. Through one-click cloud calling, users can assign tasks intelligently. When two machines meet, they will pass by priority.
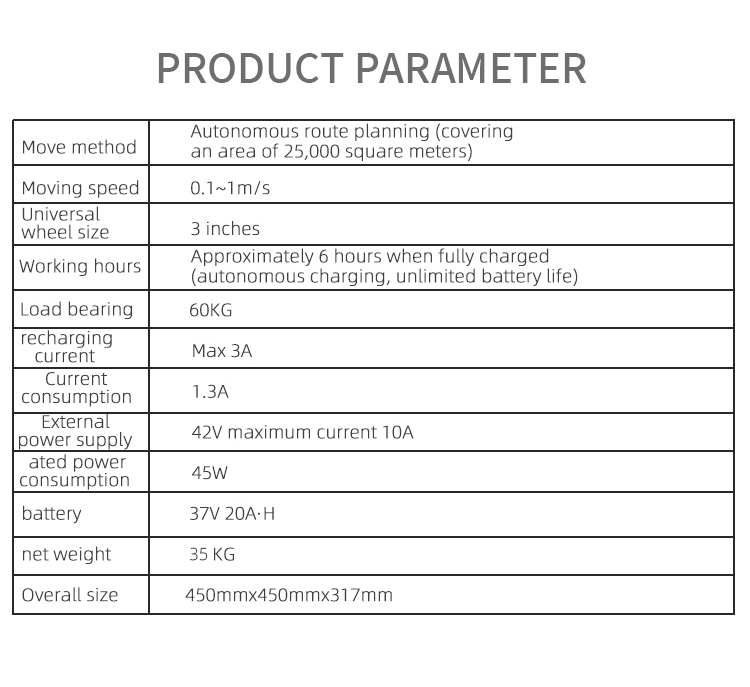
Specification