ROBOT CHASSIS
FULLY OPEN SDK
ROBOT CHASSIS
FULLY OPEN SDK
Intelligent Open SDK Smart Robot Chassis
หุ่นยนต์เคลื่อนที่อัตโนมัติ AGV
หุ่นยนต์ chassis ที่ออกแบบใหม่ประกอบไปด้วยเทคโนโลยีไฮเทคหลายตัว SDK แบบเปิด การสนับสนุนสำหรับผู้ใช้ในการพัฒนาต่อที่สูงสุด รวมกับเรดาร์เลเซอร์และการวางตำแหน่งด้วยภาพ ทำให้หุ่นยนต์ chassis สามารถใช้เทคโนโลยีการนำทางภายในอาคารจากการสร้างแผนที่อัจฉริยะ รับรองพื้นที่ถึง 40,000 ตร.ม.
หุ่นยนต์ Hot Wheel Chassis
Hot Wheel chassis คือแพลตฟอร์มหุ่นยนต์เคลื่อนที่อเนกประสงค์ที่ประกอบด้วยเทคโนโลยีเซนเซอร์ผสมผสานแบบต่างๆ เช่น lidar กล้อง 3D กล้อง IR อัลตราโซนิกและเซนเซอร์อินฟราเรด มีอัลกอริทึมนำทางแบบเต็มตัวและเสถียร นอกจากนี้ยังมีการวางตำแหน่ง การนำทางและการวางแผนเส้นทางที่สมบูรณ์แบบ อินเทอร์เฟชที่หลากหลายนี้สามารถรองรับการพัฒนาเพิ่มหรือบริการเสริมเพื่อตอบโจทย์ความต้องการของหุ่นยนต์







HOT WHEELS
ROBOT CHASSIS
SDK แบบเปิดที่นำยุค

เทคโนโลยีไร้สาย AP6255
รองรับ Dual-band WiFi 2.4G & 5G
INTEL i5 PROCESSOR
การทำงานที่รวดเร็ว
แบตเตอรี่อัพเกรด
20Ah 37V
แพลตฟอร์ม SDK แบบเปิด
SDK แบบเปิดเต็มที่สำหรับผู้ใช้งาน มีอินเทอร์เฟช API และรองรับเทคโนโลยีการวิจัยและการพัฒนาในระดับสูงสุด ทำลายข้อจำกัดเทคโนโลยีการวิจัยและการพัฒนาแบบเดิม เพิ่มประสิทธิภาพการวิจัยและการพัฒนาและลดต้นทุน


การวางแผนเส้นทางอัตโนมัติ การหลีกเลี่ยงสิ่งกีดขวางที่ยืดหยุ่น
Laser SLAM และอัลกอริทึมผสมผสานแบบ multi-sensor V-SLAM การวางแผนเส้นทางเดินของหุ่นยนต์แบบกำหนดเอง การออกแบบการกันชนด้วยกล้อง 3D ระยะตรวจจับ lidar ถึง 25 ม. มุมตรวจจับ 270 องศา การตรวจจับสภาพแวดล้อมที่แม่นยำและการอ้อมอัตโนมัติกรณีมีสิ่งกีดขวาง
การนำทางระยะไกล
การสั่งการที่สะดวกผ่านการควบคุมระยะไกลที่ไม่เหมือนใครในโลก
สร้างแผนที่ภายในอาคารด้วยการควบคุมระยะไกลและแสดงตำแหน่งผนังเสมือน ทำให้สะดวกและมีประสิทธิภาพในการทำงาน
การใช้งานผ่านเพลตฟอร์ม cloud ทำให้สามารถควบคุมและเชื่อมต่อจากระยะไกลและสร้างแผนที่นำทางได้ด้วยการมองตลอดทั้งกระบวนการ ช่วยลดเวลาตอบสนองของการทำงานและการบำรุงรักษา ทำให้ผู้ใช้งานเปิดใช้ได้ภายในเวลาอันสั้น ประหยัดทั้งเวลาและค่าใช้จ่าย

เพลตฟอร์มเปิด
สร้างแผนที่อย่างแม่นยำ
วางแผนเส้นทาง
เพลตฟอร์มเปิด
สร้างแผนที่อย่างแม่นยำ
วางแผนเส้นทาง
หลีกเลี่ยงสิ่งกีดขวาง
ชาร์จอัตโนมัติ
ดีบักระบบ Cloud
หลีกเลี่ยงสิ่งกีดขวาง
ชาร์จอัตโนมัติ
ดีบักระบบ Cloud
การเรียกใช้ลิฟท์อัตโนมัติ (ตัวเลือกเสริม)
การเรียกใช้ลิฟท์อัตโนมัติ
(ตัวเลือกเสริม)
สามารถเรียกลิฟท์โดยอัตโนมัติอย่างแม่นยำและตรวจสถานะลิฟท์ เชื่อมต่อและเข้าถึงการควบคุมลิฟท์ สามารถทำงานในชั้นต่างๆ ได้อย่างยืดหยุ่นและเสถียร

ระบบจัดการตารางเวลาอัตโนมัติ
หุ่นยนต์ chassis ใช้ระบบกำหนดตำแหน่งและการนำทางที่พัฒนาโดย Reeman ที่รองรับ cloud sharing ในสถานการณ์ที่มีหุ่นยนต์หลายตัว สามารถหลีกเลี่ยงและทำงานเป็นระเบียบในที่แออัด ด้วยการกดเพียง 1 ครั้ง ผู้ใช้สามารถมอบหมายงานได้อย่างชาญฉลาด เมื่อหุ่นยนต์ 2 ตัวมาเจอกัน ตัวหุ่นยนต์จะเคลื่อนที่ตามลำดับความสำคัญ
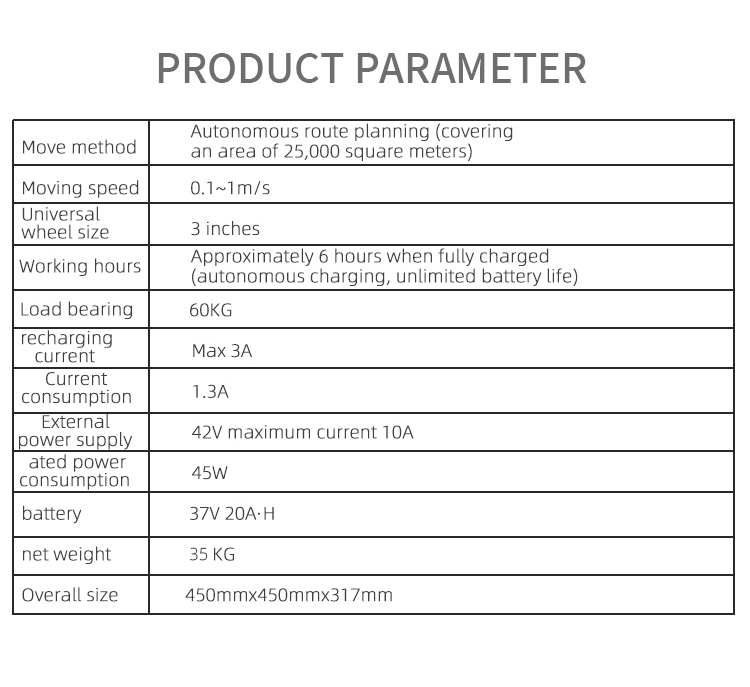
ข้อมูลจำเพาะ