ROBOT CHASSIS
ROBOT CHASSIS
Intelligent Mobile Robot Chassis
Open SDK Platform
Big dog robot chassis has an open-bottom interface for users to carry out secondary development. Users can make modifications according to actual needs to realize the application of the robot’s multi-scenario innovative ecology.
The product uses large-capacity lithium iron phosphate, which has a large load and a more vital matching interface application ability.
It uses laser SLAM and V-SLAM multi-sensor fusion algorithms to build a maximum map area of about 40,000 square meters.
It has indoor autonomous navigation and intelligent avoidance—multiple functions, such as barriers, automatic charging, etc.
Big Dog Robot Chassis
The Big Dog chassis is a robot platform product with complete perception, cognition, and positioning-navigation capabilities.
It has complete functions.
We developed the Big Dog in a modular way that provides open SDK and API interfaces to facilitate users for secondary development.
The Big Dog chassis is a robot platform product with complete perception, cognition, and positioning-navigation capabilities.
It has complete functions.
We developed the Big Dog in a modular way that provides open SDK and API interfaces to facilitate users for secondary development.







BIG DOG-ROBOT CHASSIS FEATURE
Open SDK
SLAM Mapping
Remote Navigation Deployment
Super Loading Capacity
Intelligent Obstacle Avoidance
Autonomous Route Planning
Multi-Robots Collaboration
Autonomous Take Elevator (Optional)
Rich interfaces and strong expansibility
Open SDK, provide API interfaces, complete development documents without additional hardware and computing resources, and realize customized development according to the application requirements of different scenarios.
Open SDK, provide API interfaces, complete development documents without additional hardware and computing resources, and realize customized development according to the application requirements of different scenarios.


Incremental mapping function
The Big Dog chassis adopts the positioning and navigation system independently developed by Reeman, with a laser detection distance of 25m, which can detect the surrounding environment in real-time and supports incremental map construction.
The Big Dog chassis adopts the positioning and navigation system independently developed by Reeman, with a laser detection distance of 25m, which can detect the surrounding environment in real-time and supports incremental map construction.
BIG DOG ROBOT CHASSIS SUPPORT
Open SDK, Support secondary development
Open SDK Platform
Remote Deployment
Large Capacity Battery
Open SDK Platform
Remote Deployment
Large Capacity Battery
Autonomous Obstacle Avoidance
Large Carrying Capacity
Automatic Recharge
Autonomous Obstacle Avoidance
Large Carrying Capacity
Automatic Recharge
Automatic obstacle avoidance, automatic detour
The robot application environment is complex and changeable. The big dog chassis adopts laser SLAM + 3D camera fusion technology, super environment perception ability, and realizes three-dimensional intelligent obstacle avoidance.
The robot application environment is complex and changeable. The big dog chassis adopts laser SLAM + 3D camera fusion technology, super environment perception ability, and realizes three-dimensional intelligent obstacle avoidance.


100 KG super loading
The Big Dog chassis adopts a sheet metal structure with a large carrying capacity of 100 kg, which can meet the handling of oversized items without causing deformation of the hub.
Call the elevator autonomously (optional)
Through the elevator control module, the elevator can be called autonomously, the access control can be automatically controlled, and the maps of different floors can be automatically switched to realize working on the other floors.
Through the elevator control module, the elevator can be called autonomously, the access control can be automatically controlled, and the maps of different floors can be automatically switched to realize working on the other floors.


Autonomous scheduling system
The Big Dog chassis adopts the positioning and navigation system independently developed by Reeman.
It owns unified management and scheduling of robots, supports multi-robot work in the same scene, and can set easily blocked areas, which will not cause channel congestion and improve work efficiency.

Remote Navigation Deployment
The world’s unique cloud remote and convenient deployment capability enables indoor navigation map deployment through the remote control of robots.
The world’s unique cloud remote and convenient deployment capability enables indoor navigation map deployment through the remote control of robots.
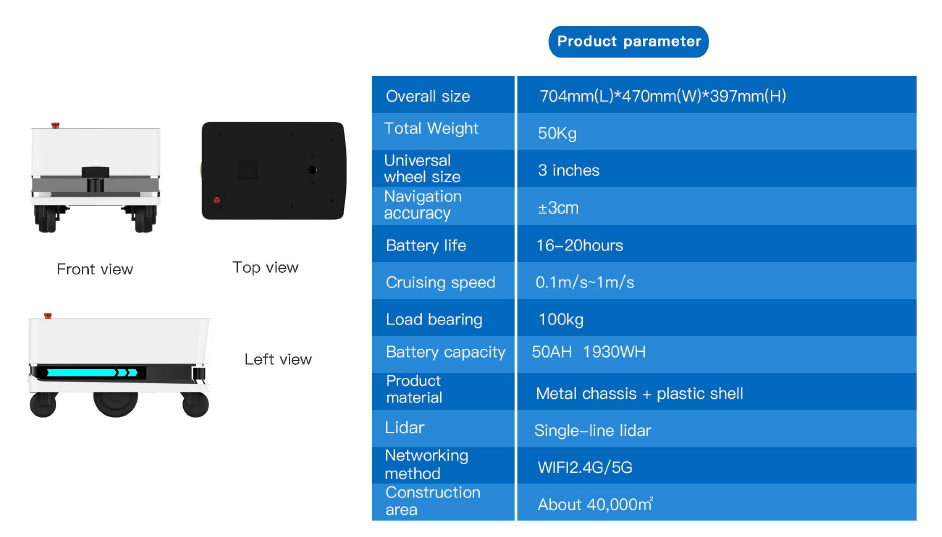
Specification